深度观察网2026年03月05日 15:57消息,华为高管称大雾中雷达比人眼更可靠,引发对智驾技术的热议。
3月5日最新消息,面对极端大雾天气,你更信任自己的判断,还是车辆的智能驾驶系统?
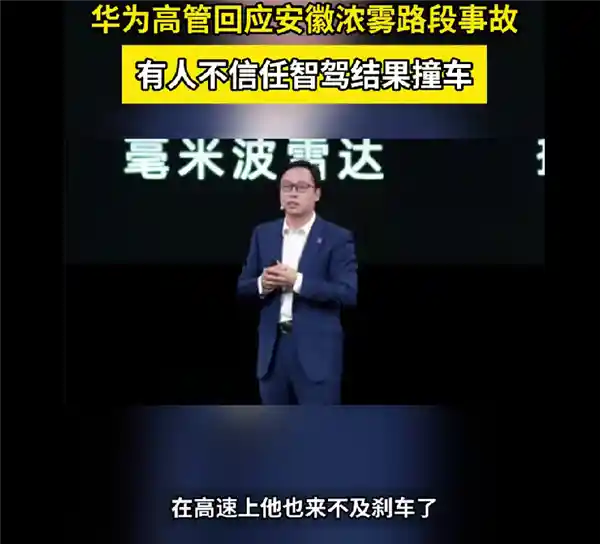
3月4日,在鸿蒙智行技术升级发布会上,华为智能汽车解决方案BU的CEO靳玉志对之前发生在安徽浓雾路段的事故作出了公开回应。
我们在春节假期期间发生了一起重大事故。当时车辆处于乾坤智驾辅助驾驶模式,经过安徽一段长时间的浓雾路段。在浓雾环境下,智驾系统已将车速降至60公里/小时。
虽然人眼无法察觉,但他觉得安全,于是将车速提升至超过100公里。同时,他的脚一直踩在油门上,车辆持续以97公里的时速行驶。 这种行为反映出驾驶员对自身安全和道路环境的误判,即便在没有明显危险的情况下,也选择保持高速行驶,增加了潜在的风险。驾驶过程中应始终保持警惕,不能仅凭主观判断来决定行车速度,尤其是在路况复杂或能见度受限的情况下。安全驾驶不仅关乎个人生命,也关系到他人的安全,不应因一时的侥幸心理而忽视交通规则和驾驶规范。
当人眼在这个浓雾里面看到前面一排静止的车辆的时候,在高速上他已经来不及刹车了,撞了一串的车。

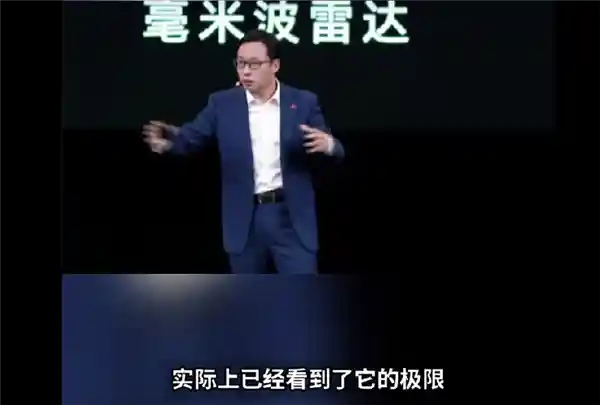
所以说,其实,目前我们使用的这种毫米波雷达,其探测能力已经接近极限,只能覆盖几十米的范围,它能够计算出车辆在该距离下的合理车速。然而,如果驾驶员过度超速,就会带来极大的安全隐患。 从技术角度来看,毫米波雷达虽能提供一定的速度监测功能,但其有效范围有限,无法全面保障行车安全。因此,驾驶者应严格遵守限速规定,避免因超速而增加事故风险。科技手段虽能辅助判断,但最终的安全仍取决于驾驶员的自律与责任意识。
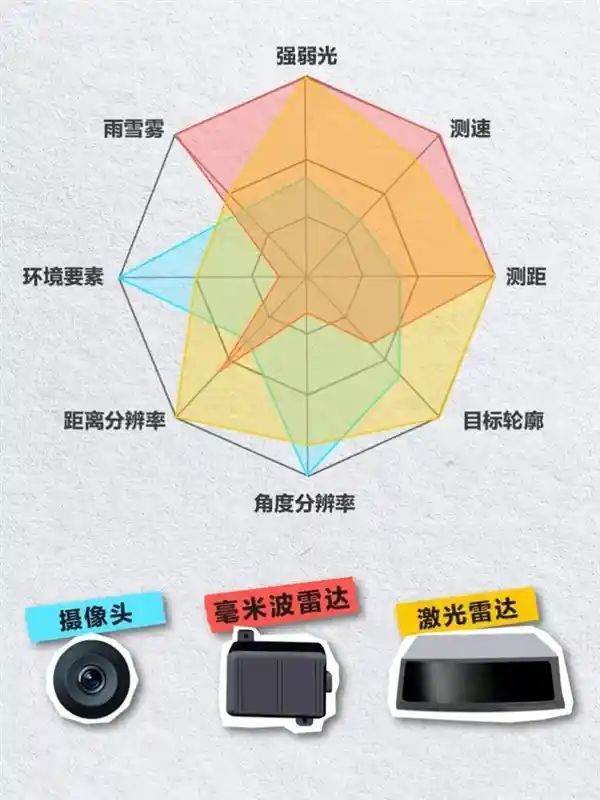
此外,靳玉志还发布了一张图表,清晰展示了各类传感器的特性。 从专业角度来看,这张图不仅直观地呈现了不同传感器在性能、应用场景及技术参数上的差异,也为行业内的技术选型提供了重要参考。在当前智能化和数据驱动的发展趋势下,传感器作为信息采集的关键环节,其特点与优势的明确界定,有助于推动相关技术的精准应用与高效整合。
简单来说,激光雷达、毫米波雷达和视觉摄像头,在不同场景下,有不同的优势。
那他们之间到底有何区别呢?
早在去年4月,余承东就曾发布科普视频,详细讲解了搭载智能辅助驾驶的汽车如何实现“眼观六路,耳听八方”的功能。 从技术角度看,这一视频不仅展现了华为在智能汽车领域的深度布局,也反映出行业对自动驾驶技术的关注正在持续升温。随着技术不断成熟,消费者对智能驾驶的认知也在逐步提升,这为未来智能汽车的普及奠定了基础。
一台智能辅助驾驶的汽车,虽然没有眼睛,但它依然能够识别并避开障碍物。这主要依赖于其搭载的传感器和先进的算法系统。通过雷达、激光雷达以及摄像头等设备,车辆可以实时感知周围环境,并做出相应反应。 在我看来,这种技术的发展不仅体现了人工智能在交通领域的深度应用,也反映了科技对人类出行方式的深刻改变。未来,随着技术的不断进步,自动驾驶将变得更加安全和可靠,为人们带来更便捷的出行体验。
余承东表示,早在上个世纪,工程师就提出了用摄像头替代人眼的想法。摄像头能够真实还原人眼所见的场景,例如交通标志、红绿灯等。然而,与人眼类似,它在逆光、夜晚以及雨雾天气条件下,也容易出现看不清楚的情况,从而导致判断失误。
于是乎,工程师们引入了毫米波雷达,这种设备不受光线影响,在夜间驾驶时仍能保持稳定的探测能力。即便在暴雨、大雾、沙尘等恶劣天气条件下,它的表现也远优于摄像头,能够提供更可靠的行车安全支持。 **看法观点:** 毫米波雷达的加入,体现了汽车安全技术的不断进步。在复杂多变的交通环境中,仅依赖摄像头已难以满足全天候、全时段的驾驶需求。毫米波雷达的稳定性和抗干扰能力,为智能驾驶和主动安全系统提供了重要保障,是提升行车安全的重要一环。
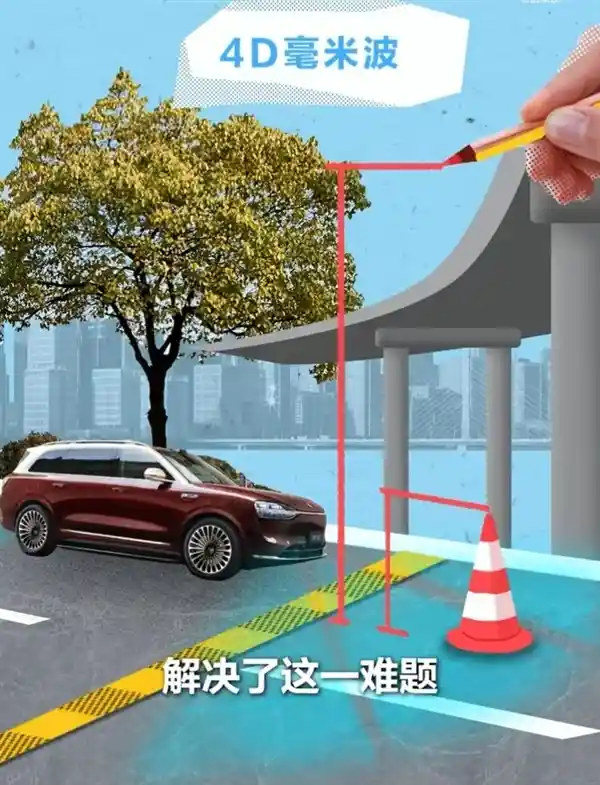
然而,探索的脚步从未停歇,人类始终追求更全面的信息。传统毫米波雷达仍存在一定的局限性,它只能测量目标的距离和运动速度,却无法获取高度信息。这意味着,对于地面的减速带、障碍物以及上方的天桥,它都无法进行有效区分。
传统毫米波雷达无法识别这些场景,因此车辆无法做出相应的不同反应。
4D毫米波雷达的引入,增强了对高度方向的探测能力,有效解决了这一长期存在的技术难题。这项技术的提升,为自动驾驶和智能交通系统提供了更精准的环境感知支持,具有重要的现实意义。在当前车辆智能化快速发展的背景下,提升雷达的三维感知能力,有助于提高行车安全与系统可靠性,值得进一步关注和推广。
但毫米波雷达的识别精度依然有限,它只能知道大概的轮廓,却无法判断障碍物的具体形状。
这时候,就该激光雷达出场了。
工作原理上,激光雷达通过发射人眼看不见的激光束,遇到物体后反射回来,形成由数百万个点组成的三维点云,例如下图中展示的手掌。这种技术在自动驾驶、测绘和智能安防等领域发挥着重要作用,为精准感知环境提供了关键支持。随着技术的不断进步,激光雷达的应用场景也在持续拓展,成为现代科技发展的重要推动力之一。
激光雷达在识别精度方面表现更优,但其穿透能力不如毫米波雷达。同时,这两种传感器都无法像摄像头那样获取颜色和亮度信息,例如对红绿灯的识别。
所以,摄像头、4D毫米波雷达和激光雷达相互配合、协同作业,只有将三者融合的感知方案应用其中,才能有效应对暗光、炫光等复杂环境,不受雨雪雾等天气影响,实现更精准的距离和速度测量。